自动灭火小车
精- 13201 10
- 发布时间:2019-06-21 10:19
- arduino mega2560主控板 +mega扩展板
2. 面包板转5v3.3V转接板(降压模块可以代替)
3. 灭火电机模块 L298N小板。排针朝下焊接插到面包板上 (只要带开关功能的模块或电路均可代替)
4. 互动按钮(蓝色选择功能,红色确定 )
5.蜂鸣器
6.四位共阴数码管(显示电机速度,AD值, 功能选择等)
7.刹车灯
8.电位器(调节小车速度)
9.云台和灭火电机
10.四针火焰传感器(这里一定要带有AD输出的)
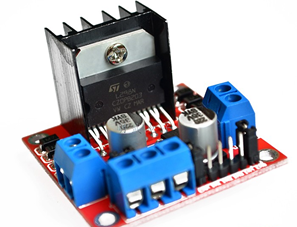
11.L290N电机驱动板
12.供电 3节 18650电池
13. HC06蓝牙模块14. 循迹模块 X2 底部
15. 超声波 X3 头部
【硬件与辅助套件介绍】
1.小车底盘。双层板。

2 主控板MEGA2560
由于多传感器四位数码管也需要很多IO口,所以最好用MEGA

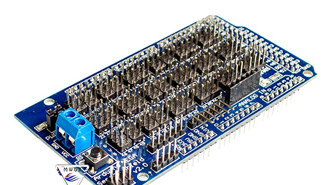
3 mega扩展板
注意插到MEGA上面以后。扩展板跳线帽那里的背面焊点会接触MEGA的DC直流输入接口的铁片。会导致短路。这里要用绝缘胶带隔开
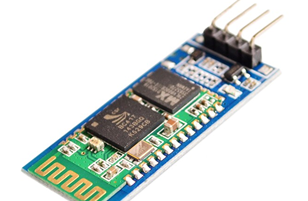
4 HC06蓝牙模块
5 面包板电路模块

6火焰传感器

7超声波模块

8 循迹 红外线黑白识别模块

小车灭火功能。用两个舵机组成的云台。通过AD值对准火焰并打开电机灭火。避障功能采用三路超声波测距,中途不会停车。蓝牙遥控功能就不跟大家展示了。
全貌:
9云台




10 舵机

11 电机驱动板

汇总
电钻 【1】
小车底盘打孔必备,无此物装车基本无法下手主控板mega2560 【1】
mega电子积木扩展板 【1】
四针火焰传感器 【3】
HC06蓝牙模块 【1】
超声波传感器 【3】
超声波支架 【3】
L298N大板【1】
L298N小板【1】
面包板电源模块【1】
可调旋转电位器 【1】
四位共阴数码管 【1】
峰鸣器【1】
5MM发光二级管 【2】
220R色环电阻【4】 用于数码管
1K色环电阻【3】 用于刹车灯
中型面包板【1】 插蓝牙按钮电源转换等
小型面包板【3】 插电位器刹车灯数码管 电源开关等
三节18650电池盒 【1】
18650电池 【3】
绝缘黑色胶布【1】 循迹贴在地上的黑色的线路就是绝缘胶布
杜邦线若干。公线母线公母线都需要
M3铜柱 螺帽 螺丝 若干
虽然配件并不太多.但在组装的过程中还是遇到了很多问题。必竟都不是标准插口或接口。并不是直接接上或是上几个螺丝就可以了,有很多东西都需要自己想办法固定。比如云台怎么固定在底盘上。灭火电机怎么固定在云台上。传感器应该放在哪里。在哪里打孔,线应该怎么走插在哪里。等各种乱七八糟的问题都需要想办法解决。
四路电机两两并联使用。
电路走线方面
电池盒12V出来以后通过电源开关。接在面包板上。然后并联分成两路。一路给L298N电机驱动板。一路给中型白色的面包板【灭火电机要与主控板分开供电,如果在一条线路上。由于电机工作时电流太大的问题会导致主控板无法工作】。L298N的主控板内置的5V引出来给MEGA供电,所有的控头跟设置全接在MEGA扩展板上面即可
【软件编写】
1 循迹
两个传感器通过digitalRead检测地面。如果在黑线上面就是LOW。如果在地面上就是HIGH。
这里要注意电机的驱动方式。如果是左转那么左边两个电机前进。右边的电机不要动(不能后退)。如果右侧电机也动那么 就是原地转弯。这样小车在黑线上面的抖动很厉害
2蓝牙
串口蓝牙直接接在串口2或3或4上面。MEGA有4路串口引脚。接在1上面下载程序会占用。需要每次先下程序后插设备比较麻烦。
编写一个手机蓝牙的APP、连接蓝牙发送字码。比如发1为前进,2为后退.......舵机与灭火电机。小车速度都可以发送指定的字码控制,mega通过Serial2.Read接收到字码做相应的处理
3灭火
在循迹的基础上通过analogRead读取三路的火焰传感器的AD值。如果小于一定的值就停车。把舵机初使化到一个方向。往并外一个方向慢慢的转动。转动中也要监视火焰探头的AD值
小于一定值的时候然后直接停止旋转的舵机。舵机开始上下旋转瞄准。AD值差不多小于40的时候就完全对准了火焰。如果绑在云台上的探头离灭火风扇比较远的话。根椐实际
情况自己调节。还有一种情况就是火焰有时候吹不灭【风扇风力太小】。需要把小车在往前面开一点点。开多少自己也可以控制。然后近距离在对准灭火一般都能灭掉
4避障
这里跟那种舵机加超声波有一点不同。那种我也测试过。效果不是太好。需要停车摆动舵机总感觉怪怪的。
原理是获取三路超声波的距离。然后通过计算往左还是往右。转弯的时候在while循环里面一直计算左中右的距离。左转就计算左。右转就计算右边。死角就计算前方。转到可以前进的角度以后就退出循环,这里的转弯跟循迹的转弯不同,左转就是左边两个电机后退。右边两个电机前进。这样的幅度就是一个原地转弯
@扶与:谢谢你的夸奖,期望我们能一起进步!
@扶与:谢谢你的夸奖,期望我们能一起进步!
@扶与:谢谢你的夸奖,期望我们能一起进步!
@扶与:谢谢你的夸奖,期望我们能一起进步!
@扶与:谢谢你的夸奖,期望我们能一起进步!